传感器调试总结
光线距离
LTR-553ALS-WA
-
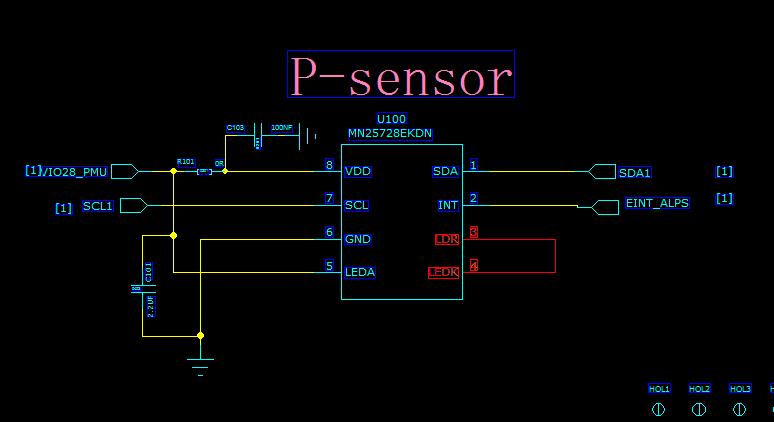
原理图
-
驱动移植代码 ltr559-易景.rar
-
调试问题总结
-
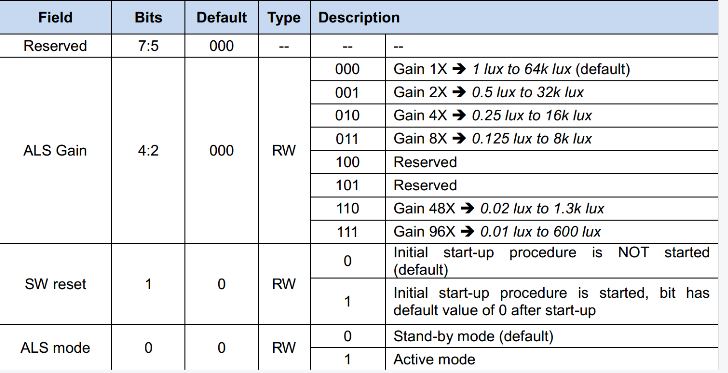
光线传感器需要调整在暗环境下的灵敏度,修改0x80寄存器LTR559_ALS_CONTR,调节als的gain
调整光线传感器灵敏度驱动代码修改2处
第一处:
static int ltr559_als_enable(struct i2c_client *client, int enable) { //struct ltr559_priv *obj = i2c_get_clientdata(client); int err=0; u8 regdata=0; //if (enable == obj->als_enable) //return 0; regdata = ltr559_i2c_read_reg(LTR559_ALS_CONTR); if (enable == 1) { APS_LOG("ALS(1): enable als only \n"); regdata = 0x1c; // 修改此值 err = ltr559_i2c_write_reg(LTR559_ALS_CONTR, regdata); } else { APS_LOG("ALS(1): disable als only \n"); regdata = 0x00; err = ltr559_i2c_write_reg(LTR559_ALS_CONTR, regdata); } if(err<0) { APS_ERR("ALS: enable als err: %d en: %d \n", err, enable); return err; } //obj->als_enable = enable; msleep(WAKEUP_DELAY); return 0; }第二处:
// Enable ALS to Full Range at startup als_gainrange = ALS_RANGE_600; /*ALS_RANGE_1300;*/ //修改这里,让gain变为最灵敏的0x1c, LTR559_ALS_CONTR = 0x80 init_als_gain = als_gainrange; switch (init_als_gain) { case ALS_RANGE_64K: res = ltr559_i2c_write_reg(LTR559_ALS_CONTR, MODE_ALS_Range1); break; case ALS_RANGE_32K: res = ltr559_i2c_write_reg(LTR559_ALS_CONTR, MODE_ALS_Range2); break; case ALS_RANGE_16K: res = ltr559_i2c_write_reg(LTR559_ALS_CONTR, MODE_ALS_Range3); break; case ALS_RANGE_8K: res = ltr559_i2c_write_reg(LTR559_ALS_CONTR, MODE_ALS_Range4); break; case ALS_RANGE_1300: res = ltr559_i2c_write_reg(LTR559_ALS_CONTR, MODE_ALS_Range5); break; case ALS_RANGE_600: res = ltr559_i2c_write_reg(LTR559_ALS_CONTR, MODE_ALS_Range6); break; default: res = ltr559_i2c_write_reg(LTR559_ALS_CONTR, MODE_ALS_Range1); APS_ERR("proxmy sensor gainrange %d!\n", init_als_gain); break; }抓取log查看暗环境als值,修改dts里面的值对应关系
-
重力
指南针
- 指南针测试APK下载 指南针.apk
- 指南针方向调试